
DK-45605与DK-45686 SmartMotion开发平台硬件使用指南
DK-45605与DK-45686 SmartMotion开发平台硬件使用指南
各位电子工程师们,今天来给大家详细介绍一下InvenSense的DK-45605与DK-45686 SmartMotion开发平台(Ver. I)。这是一个功能强大的开发系统,能助力我们进行TDK InvenSense运动传感器设备的快速评估和开发。
文件下载:TDK InvenSense 用于ICM-45605 IMU的DK-45605开发套件.pdf
一、概述
平台简介
TDK SmartMotion Platform Ver. I是围绕Microchip SAMG55 MCU设计的综合开发系统,专为TDK InvenSense运动传感器设备打造。它集成了板载嵌入式调试器(EDBG),无需外部工具就能对SAMG55 MCU进行编程和调试。同时,平台还配备了必要的软件,如InvenSense MotionLink(基于GUI的开发工具)和嵌入式运动驱动程序(eMD)。
软件功能
- eMD:由一组API组成,可用于配置平台的各个方面,包括运动传感器参数(如满量程范围FSR、输出数据速率ODR)、信号重定向到专用引脚、传感器低通滤波器截止或报警位检查等。
- MotionLink:基于GUI的开发工具,可用于捕获和可视化运动传感器的数据。
平台兼容性
该平台支持Atmel Studio,并且与Microchip Xplained Pro扩展板兼容。Xplained Pro扩展系列评估套件可提供额外的外设,扩展开发板的功能,方便我们进行客户设计开发。
二、特性与平台概述
特性概述
- 集成TDK InvenSense运动传感器。
- 支持通过插入子板(DB)连接磁传感器。
- 采用Microchip SAMG55微控制器,拥有512 KB Flash。
- 板载嵌入式调试器(EDBG),用于编程和调试。
- 内置FTDI USB转UART接口,实现快速运动传感器数据传输。
- 配备USB连接器,用于主机接口进行软件调试和数据记录。
- 通过USB为开发板供电。
平台概述
TDK SmartMotion Platform Ver. I是用于TDK传感器产品评估和算法软件开发的硬件单元,支持多种不同的应用开发。
硬件用户指南
该平台与Microchip的SAM G55 Xplained Pro兼容,Atmel Xplained Pro用户指南的链接为:http://www.atmel.com/Images/Atmel-42389-SAM-G55-Xplained-Pro_User-Guide.pdf
三、传感器与开发套件
支持的传感器类型
| TDK SmartMotion Platform Ver. I支持多种类型的TDK IMU和压力传感器。基于该平台的开发套件(DKs)如下表所示: | # | DK PART NUMBER | SUPPORTED SENSOR | SMT IN |
|---|---|---|---|---|
| 1 | DK-45605 | ICM-45605 | U1 | |
| 2 | DK-45686 | ICM-45686 | U1 |
DK-45605
这是TDK IMU ICM-45605的开发套件。ICM-45605是一款高性能的6轴MEMS MotionTracking设备,具有可配置的主机接口,支持I3C、I2C和SPI串行通信,以及用于连接外部传感器的I2C主模式接口。该设备具有高达8K字节的FIFO和2个可编程中断。详细的传感器信息请参考ICM-45605数据手册。
DK-45686
这是TDK IMU ICM-45686的开发套件。ICM-45686是一款高性能的双接口(UI + AUX)6轴MEMS MotionTracking设备,具有可配置的主机接口,支持I3C、I3CSM、I2C和SPI串行通信,以及用于连接OIS控制器的SPI从模式或用于连接外部传感器的I2C主模式的AUX接口。该设备同样具有高达8K字节的FIFO和2个可编程中断。详细的传感器信息请参考ICM-45686数据手册。
四、SmartMotion系统设计
系统框图
板载的EDBG MCU AT32UC3A4256HHB - C1UR允许用户在不使用外部工具的情况下对主MCU SAMG55进行调试、跟踪和编程。系统框图如下: 
主MCU SAMG55资源分配
| SAMG55 RESOURCE | USAGE |
|---|---|
| UART 0 (PA9/10/25/26) | 默认情况下,UARTO连接到FTDI输入。在J200上使用Extension - 1的情况下,可通过跳线J3断开UARTO与FTDI的连接。 |
| TW6(12C) (PB8/9) | 用于通过CN2连接外部传感器的主I2C线路。 |
| SPI5 (PA11/12/13/14) | SPI5主设备连接到TDK IMU传感器。板载IMU传感器/CS = PNCSO。 |
| GPIO (INTs) PA17/18/20/30和PB15 | 这些GPIO用于传感器中断输入和其他智能功能。具体参考系统框图中的表格。 |
| TW4(12C) | 主IC与EDBG MCU从I2C通信。 |
| UART6 | 用于EDBG DGI - UART接口。 |
| UART7 | 用于EDBG CDC - UART接口。 |
连接器
| CONNECTOR NAME | CONNECTOR REF# | CONNECTOR FUNCTION DESCRIPTIONS |
|---|---|---|
| Other Sensor DB | CN2/CN3 | 用于磁传感器的子板连接器,仅用于PC接口。 |
| FTDI USB | CN6 | USB连接器,用于FTDI USB转串行UART接口。 |
| EDBG LEDS | D500/D501 | EDBG指示灯,D500为绿色,D501为黄色。 |
| Sensor I2C Selection | 11 | 选择连接到SAMG55主I2C的传感器。 |
| PWR Source Select | J2 | 开发板电源源选择。 |
| VDDIO Voltage Select | J3 | 为VDDIO选择3.3V、1.8V和1.2V之间的电压电平。 |
| Test pins | J4 | 数字信号测试引脚。 |
| SAMG55 USB | J301 | MCU SAM G55 USB连接器。 |
| EDBG USB | J500 | EDBG MCU USB连接器。 |
| User Button | SW300 | 用户按钮连接到MCU GPIO,功能由用户定义。 |
| Reset Button | SW301 | 复位按钮:用于目标MCU和EDBG MCU的硬件复位。 |
跳线设置
| JUMPER | DESCRIPTION |
|---|---|
| J1 | 用于选择哪个传感器将连接到SAMG55主I2C。仅允许两个跳线短路。引脚1/2和3/4上的跳线短路:IMU传感器主I2C连接到SAMG55 I2C主设备;引脚5/6和7/8上的跳线短路:其他传感器I2C连接到SAMG55 I2C主设备。在此配置中,TDK IMU传感器连接到SAMG55 SPI主设备。 |
| J2 | 用于开发板电源源选择。仅允许一个跳线短路。引脚1/2上的跳线短路:开发板电源来自J500上的EDBG USB;引脚3/4上的跳线短路:开发板电源来自CN6上的FTDI USB;引脚5/6上的跳线短路:开发板电源来自J30上的SAMG55 USB。 |
| J3 | 用于系统VDDIO电平选择。引脚 - 1/2上的跳线短路:VDDI0 = 3V3;引脚 - 3/2上的跳线短路:VDDIO = 1V8;引脚 - 4/2上的跳线短路:VDDI0 = 1V2。 |
| J4 | J4具有数字信号作为测试点。引脚 - 1:SPI/CS;引脚 - 2:SPI SCLK,I12C SCL;引脚 - 3:SPI MOSI,I2C SDA;引脚 - 4:SPI MISO,I2C AD0;引脚 - 5:INT1;引脚 - 6:INT2;引脚 - 7:GND。 |
五、原理图与开发板PCB
原理图
原理图部分展示了开发板的电路设计,包括主MCU、嵌入式调试器、传感器、DB和EVB连接器等部分的电路连接。
开发板PCB
开发板PCB的设计对于信号传输、电磁兼容性等方面都有着重要影响。这里给出了Ver. I PCB的顶视图和底视图。 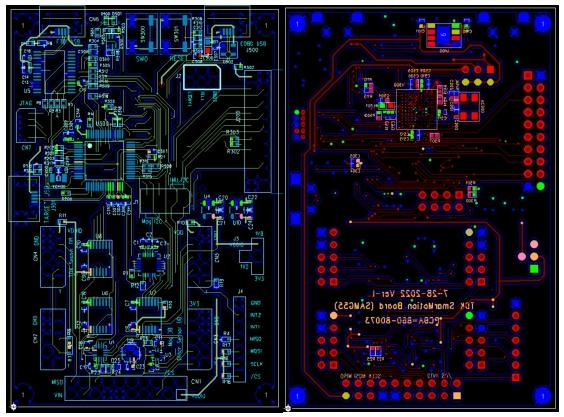
六、总结
TDK SmartMotion Platform Ver. I为我们电子工程师提供了一个功能丰富、易于使用的开发平台。通过集成多种传感器和强大的软件工具,以及合理的硬件设计和资源分配,我们可以更高效地进行TDK传感器产品的评估和开发。大家在使用过程中,一定要仔细参考相关的数据手册和本指南,合理设置跳线和连接器,充分发挥开发平台的优势。同时,也要注意文档中的免责声明,确保我们的开发工作符合相关规定。大家在实际使用这个平台的过程中,有没有遇到什么特别的问题或者有什么独特的使用技巧呢?欢迎在评论区分享交流。
本文 zblog模板 原创,转载保留链接!网址:https://www.wbaas.cn/fengrong/1143.html
1.本站遵循行业规范,任何转载的稿件都会明确标注作者和来源;2.本站的原创文章,请转载时务必注明文章作者和来源,不尊重原创的行为我们将追究责任;3.作者投稿可能会经我们编辑修改或补充。